Cамоучитель по Assembler
Протокол передачи данных для интерфейса Centronics.
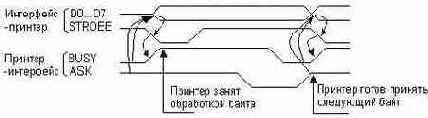
Сигнал BUSY считается активным, когда он имеет высокое значение. В противоположность этому активное состояние сигналов STROBE' и АСК' низкое, отчего они и обозначаются с тем или иным дополнительным значком (с чертой наверху, со знаком минус или с апострофом, как у нас). Прослеживая соответствие сигналов интерфейса состоянию битов его портов, необходимо иметь в виду, что для некоторых сигналов (SLCT, РЕ, STROBE) в порты записываются их прямые значения, а для других (ERROR, АСК, BUSY) - инверсные.
Вывод на принтер каждого байта данных состоит из трех этапов. Прежде всего программа должна дождаться неактивного состояния сигналов BUSY и АСК (это и есть ожидание готовности устройства). Убедившись, что биты 6 и 7 порта состояния 379h установлены в 1 (см. Рисунок 3.11), программа посылает в порт данных 378h байт данных, что приводит к установке кода данных на линиях интерфейса D7...D0. Наконец, программа должна установить на короткое время сигнал STROBE, что реализуется путем установки и затем сброса бита 0 порта управления 37All. Следующие байты посылаются точно таким же образом.
Выполняя все эти операции, необходимо учитывать временные характеристики интерфейса. Сигнал STROBE можно посылать в порт управления не ранее, чем через 0,5 мкс после установки данных, что может потребовать введению в программу небольшой программной задержки (одной или нескольких команд jmp, см. приведенный ниже текст программы). То же относится и к длительности сигнала STROBE, которая не должна быть меньше той же величины 0,5 мкс. Практически программные задержки часто оказываются не нужны.
Обратимся еще раз к Рисунок 3.12. Принтер, сняв с линий данных байт данных, и начав его обработку (вывод на печать или сохранение во внутренней памяти), устанавливает ответный сигнал BUSY, действующий все время, пока принтер занят обработкой байта данных. Закончив обработку байта, принтер на некоторое время устанавливает сигнал АСК и сбрасывает сигнал BUSY. Окончание сигнала АСК (при сброшенном состоянии сигнала BUSY) говорит интерфейсу об окончании данной операции обмена и о возможности посылки следующего байта данных. Ввиду краткости сигнала АСК часто оказывается, что ожидать его снятия нет необходимости; достаточно дождаться неактивного состояния сигнала BUSY (т.е. 1 в бите 7 порта состояния). Вообще следует заметить, что различные принтеры могут несколько по разному выполнять свою часть протокола обмена. Рассмотренный ниже пример отлаживался на принтере Epson LQ100.
Приведем текст программы, в которой принтер программируется, как говорят, на физическом уровне, т.е. путем обращения к его портам. Разумеется, в большинстве случаев для вывода на принтер текста из выполняемой программы проще воспользоваться функциями DOS. Однако в некоторых специальных случаях приходится прибегать и к программированию через порты, например, если принтер используется в нестандартном режиме, или параллельный интерфейс служит для связи с нестандартным устройством.
В приведенном примере предполагается, что принтер выбран и установлен в исходное рабочее состояние, что обычно выполняется автоматически при его включении. Свидетельством этого будут установленные биты 2 и 3 (SLCT IN и INIT) в порте управления, а также бит 4 (SLCT) в порте состояния. В программе не выполняется анализ байта состояния на наличие ошибки или конца бумаги, что при работе с принтером, вообще говоря, следует предусматривать.
Третий метод программирования периферийного устройства - режим прерываний - рассмотрим на примере обработки прерывания от мыши. Как известно, мышь обычно подключается к первому последовательному порту СОМ1 и работает в режиме прерываний. Нажатие или отпускание любой клавиши, так же, как даже минимальное перемещение по столу, вырабатывает сигналы прерываний, сопровождаемые определенными кодами, которые поступают в порт данных интерфейса. Написав собственный обработчик прерываний для последовательного порта, мы получим возможность выполнять заданные действия, например, при нажатии левой и правой клавиш мыши. Следует подчеркнуть, что эти действия начнут выполняться практически в тот же момент, когда мы нажали на клавишу. В приведенной ниже программе при нажатии левой клавиши в центр экрана выводится цветная надпись "Левая!", а при нажатии правой клавиши - надпись "Правая" другого цвета.
Для того, чтобы приведенная программа работала, следует загрузить драйвер мыши, который инициализирует последовательный интерфейс и саму мышь. В состав этого драйвера входит свой обработчик прерываний. Мы замещаем его адрес в векторе 0Ch адресом нашего обработчика, и поскольку в программе не предусмотрено сцепление обработчиков, на время действия программы стандартная обработка прерываний от мыши отключается. Перед завершением программы содержимое вектора 0Сh восстанавливается, и мышь опять начинает работать, как обычно.
Каждое нажатие (или отпускание) клавиши мыши, так же, как и ее перемещение, в действительности вырабатывают не по одному, а по три последовательных прерывания с различными кодами в порте данных интерфейса. Так, нажатие левой клавиши мыши дает последовательность кодов 60h, 0, 0, нажатие правой клавиши - последовательность 50h, 0, 0, отпускание любой клавиши - 40h, 0, 0, перемещение вверх - 4Ch, 0, 3Fh, перемещение вниз - 40h, 0, 1 и т.д. Таким образом, по-настоящему надо было сохранять в обработчике прерываний все три кода и затем анализировать всю последовательность. Мы для простоты ограничились анализом только первого кода. Как видно из приведенного выше перечня, анализ одного кода не дает возможность отличить, например, отпускание клавиши от перемещения вниз.
Коды, генерируемые мышью, могут зависеть от ее типа, что надо учитывать при подготовке этого примера. Для получения значений генерируемых кодов можно предусмотреть в обработчике прерываний вывод их на экран с помощью функции прерывания 10h BIOS, как это было сделано, например, в примере 3-5, или прямым выводом в видеобуфер. Следует только иметь в виду, что перехват любого прерывания от последовательного интерфейса должен обязательно сопровождаться чтением из его порта данных, так как интерфейс может принять очередной байт данных только после чтения предыдущего и освобождения своего регистра данных.
Пример Программирование мыши в режиме прерываний
.586 ;Будут команды новых процессоров
code segment use16 ;16-разрядное приложение
assume CS : code,DS:code ;Данные в сегменте команд
main proc
push CS ;Настроим DS
pop DS ;на сегмент команд
;Сохраним обработчик прерываний последовательного порта
mov AX,350Ch ;Функция 35h, вектор 0Сh
int 21h
mov word ptr old_Oc,BX ;Сохраним смещение
mov word ptr old_Oc+2,ES ;Сохраним сегмент
;Установим наш обработчик прерываний последовательного порта
mov AX,25ОСЬ ;Функция 25h, вектор 0Сh
mov DX,offset new_0c ;Адрес нашего обработчика
int 21h
;Остановим программу функцией ввода с клавиатуры
mov AH,01h
int 21h
;Восстановим исходный обработчик драйвера мыши
mov AX,250Ch ;Функция 25h, вектор 0Сh
Ids DX,old_0c ;Сохраненный адрес
int 21h
mov AX,4C00h ;Завершим программу
int 21h
main endp
new_0c proc
pusha ;Сохраним все регистры
push DS ;Сегментные регистры не
push ES ;сохраняются командой pusha
mov DX,3F8h ;Порт данных
in AL,DX ;Прочитаем
cmp AL, 60h ;Левая клавиша — код 60h
je Ibtn ;Переход на отработку
cmp AL, 5Oh ;Правая клавиша — код 5Oh
je rbtn ;Переход на отработку
;Завершение обработчика прерываний
outret:pop ES ;Восстановим сегментные
pop DS ;регистры
mov AL,20h ;Команда EOI
out 20h,AL ;в контроллер прерываний
рора ;Восстановим все регистры
iret ;Выход из прерывания
;Если нажата левая клавиша мыши
Ibtn: mov АН, 1Eh ;Атрибут символов желтый по
; синему
mov SI,offset msgdn ;Адрес выводимой строки
jmp commn ;Ha общую часть вывода
;Если нажата правая клавиша мыши
rbtn: mov AH,2Eh ;Атрибут символов желтый по
;зеленому
mov SI,offset msgdn ;Адрес выводимой строки
;Общая часть вывода на экран диагностической строки
commn: mov BX,OB800h ;Настроим ES
mov ES,BX ;на видеобуфер
push CS ;Настроим DS
pop DS ;на наш сегмент
mov CX,6 ;Число выводимых символов
mov DI,2000 ;Смещение на экране
cld ;Движение вперед
scr: lodsb ;АL=очередной символ
stosw ;Из АХ на экран
loop scr ;Цикл
jmp outret ;После вывода завершить
;обработку прерывания
new_0c endp
old_0c dd 0 ;Ячейка для исходного
;вектора
msgdn db "Левая!" ;Выводимые сообщения
msgup db "Правая"
code ends
stk segment stack
dw 128 dup(O)
stk ends
end main
Приведенный пример с точки зрения его структуры построен обычным образом. Исходное содержимое вектора 0Ch сохраняется в ячейке old_0c и используется перед завершением программы для восстановления вектора. Для упрощения установки обработчика прерываний программа написана без сегмента данных; ее немногие данные размещены в сегменте команд. Поскольку в начале программы регистр DS настраивается на сегмент команд, адресация к данным (в основной программе) возможна через DS. Для того, чтобы можно было наблюдать обработку прерываний от мыши, основная программа после выполнения инициализирующих действий останавливается с помощью функции 01h DOS ожидания ввода символа с клавиатуры. После нажатия любой клавиши программа завершается, восстановив предварительно исходное состояние вектора последовательного порта.
Действия, которые должны инициироваться нажатием левой или правой клавиш мыши (например, включение или выключение некоторого оборудования), в программе заменены выводом на экран коротких диагностических сообщений. Вывод осуществляется прямой записью в видеобуфер, поскольку, как уже говорилось ранее, в обработчике аппаратных прерываний нельзя использовать функции DOS и рискованно - функции BIOS. Вывод на экран с помощью команд обработки строк lodsb и stosw требует настройки большого количества регистров - в DS:SI должен находиться адрес строки-источника, в ES:DI адрес позиции в видеобуфере, в СХ число выводимых символов. Кроме этого, в обработчике прерываний используются регистры АХ, ВХ и DX. Для сохранения всех регистров общего назначения используется команда pusha, а для их восстановления команда рора. Однако эти команды не принимают в расчет сегментные регистры, и их приходится сохранять и восстанавливать от дельными командами.
С восстановлением регистров может возникнуть некоторая сложность. Обработчик прерывания должен завершаться посылкой в контроллер прерываний команды EOI, а для этого необходим регистр AL. Поэтому восстановление регистров, во всяком случае, регистра АХ, необходимо выполнять после команды EOI. С другой стороны, команда EOI разблокирует нижележащие уровни прерываний в контроллере прерываний (см. гл. 3), что может привести к прохождению через контроллер очередного (вложенного в наше) прерывания, которое прервет наш обработчик в точке, где еще не восстановлены регистры. Это неминуемо приведет к краху системы. Однако в процессоре предусмотрены меры устранения этого неприятного явления. Остановимся на них более подробно.
Процессор, приняв любой сигнал прерывания, сбрасывает флаг IF в своем регистре флагов, запрещая тем самым все аппаратные прерывания. Поэтому вход в обработчик прерываний всегда осуществляется при запрещенных прерываниях. Блокировка нижележащих уровней в контроллере прерываний просто накладывается на этот общий запрет и новых ограничений не вносит.
Если в тексте обработчике прерываний нет команды разрешения прерываний sti, то прерывания будут запрещены до самого его конца, до завершающей команды iret. Эта команда извлекает из стека и восстанавливает исходное содержимое регистров CS:IP, а также регистра флагов. В момент прерывания в регистре флагов был безусловно установлен флаг IF, иначе прерывание не могло бы возникнуть. Восстановление регистра флагов приводит к установке этого флага и разрешению всех аппаратных прерываний, но уже после завершения обработчика прерываний. Таким образом, снятие аппаратной блокировки прерываний командой EOI в действительности не приводит к разрешению прерываний, и любые строки, стоящие после этой команды, выполняются при запрещенных прерываниях. В результате никаких проблем с восстановлением регистров после команды EOI не возникает.
Обычно, однако, используется другой вариант построения обработчика прерываний. В этом варианте в начале программы обработчика выполняется команда sti, устанавливающая флаг IF и разрешающая все аппаратные прерывания, кроме тех, которые заблокированы в контроллере прерываний. В результате программа обработчика может быть прервана любым прерыванием более высокого уровня IRQ (т.е. уровня с меньшим номером), но не прерывается сигналами прерываний этого же и более низких уровней. Такое построение обработчиков прерываний удобно тем, что "более важные" прерывания, например, от таймера или клавиатуры, могут быть обработаны без задержки. Для того, чтобы исключить возможные неприятности с восстановлением регистра АХ после команды EOI, перед ней прерывания запрещаются командой cli и структура обработчика прерываний приобретает приблизительно такой вид:
sti
pusha ;Сохранение регистров
... ;Тело обработчика
cli ;Запрещение всех прерываний
mov AL,20h ;Команда EOI
out 20h,AL ;контроллеру прерываний
рора ;Восстановление регистров
iret ;Возврат из обработчика
Команды рора и iret выполняются в этому случае при запрещенных прерываниях, но после отработки команды iret в регистре флагов восстанавливается его исходное содержимое (в котором IF = 1), и прерывания, таким образом, снова разрешаются.